
En este artículo se pretende explicar cómo FAGUS determina el brazo mecánico z de una pared de cortante incluida dentro de un modelo cortante-torsor (V-T) que se desea introducir en FAGUS.
El brazo mecánico de una pared de cortante z se define, en el caso de una pared de cortante vertical, como la distancia entre el cordón de compresión y de tracción de una sección:
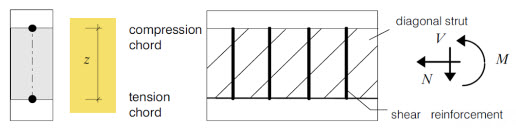
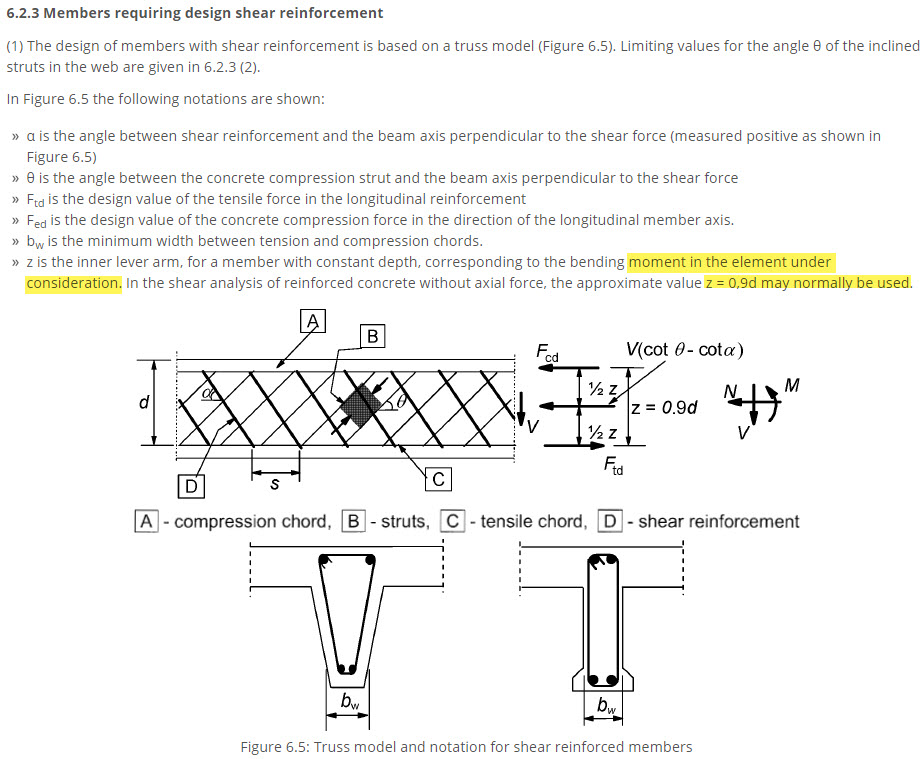
En un caso habitual de una sección sometida a flexión simple, el Eurocódigo indica que z se puede considerar 0.9d como se observa a continuación:
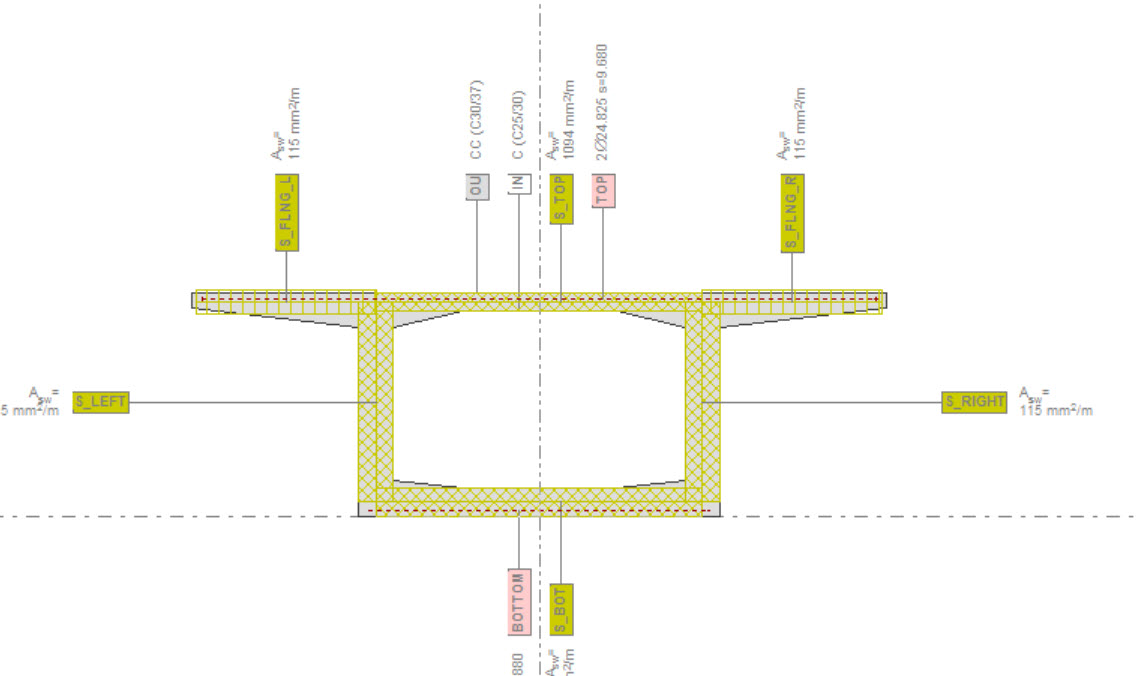
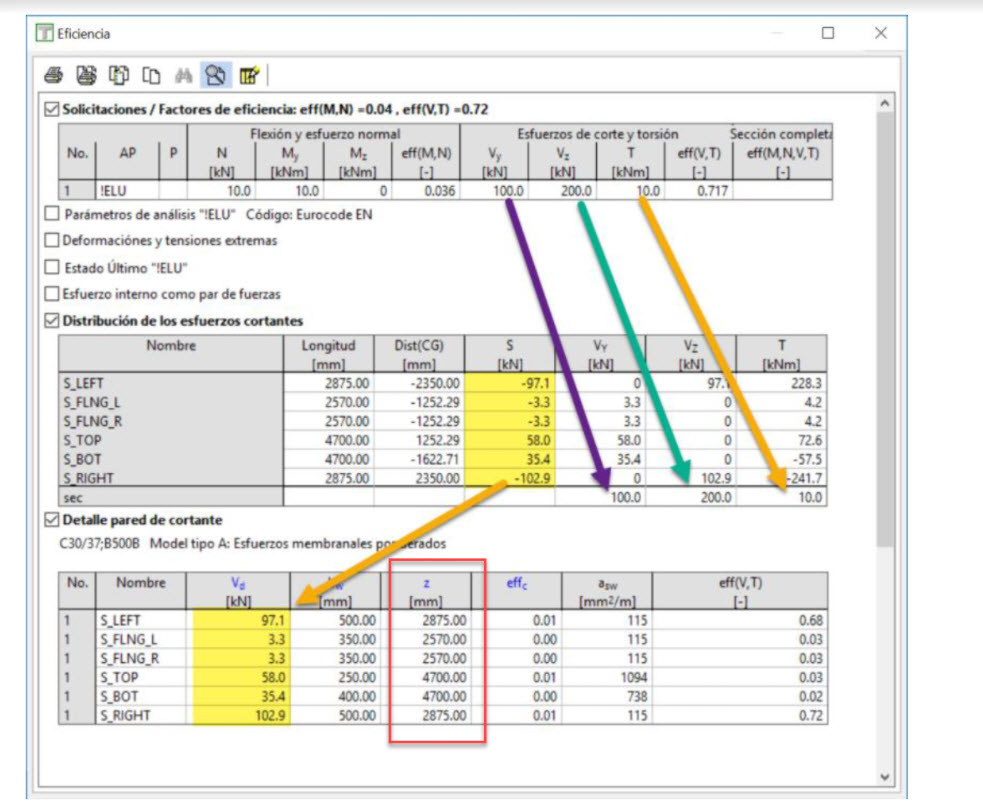
Cuando se crea una pared de cortante mediante la interfaz de FAGUS, el programa determina el valor de z a partir de la geometría de la misma, es decir, del dibujo que se haya definido. No es posible pedir al programa que ajuste el valor de z de forma manual actuando de forma inversa, es decir, introduciendo un valor de z y que se redibuje en la figura.
Lo anterior se debe a la complejidad que supondría definir manualmente z en una sección genérica donde habrá diversas paredes de cortante, que pueden participar en los mecanismos de cortante Vy, Vz y torsión y que cada una de ellas, en función de su z, tendrá una eficiencia de la biela comprimida (effc).
En definitiva, la forma en la que trabaja FAGUS facilita el trabajo que supone definir las paredes de cortante en un modelo de cálculo cortante-torsor (V-T).
Este artículo fue originalmente publicado en el Help Center de Cubus-Software España, empresa responsable de la distribución, soporte técnico y formación de los programas Cubus en España, Portugal e Hispanoamérica, y que junto a ingenio.xyz ha desarrollado el único curso online de FAGUS-7 avalado por CUBUS AG (licencia de estudiante disponible).

















